Using an Integrated Development Environment
Using an integrated development environment for developing EEROS applications is highly recommended. You have all the features such as source code lookup, code completion or automatic compiling. We recommend to use an integrated development environment such as https://www.kdevelop.org/ or https://code.visualstudio.com/.
 If you are using an SDK for a given target or ROS in your applications, make sure that you source the SDK and fullfill the necessary steps described in ROS: Preparations and Building before starting the IDE.
If you are using an SDK for a given target or ROS in your applications, make sure that you source the SDK and fullfill the necessary steps described in ROS: Preparations and Building before starting the IDE.
Use KDevelop with Existing Build Configuration
No Existing Build Configuration
If you have previously built your application manually or with the aid of the EEROS scripts, you can import the configuration into KDevelop as follows:
- Import the project by choosing the
CMakeLists.txtof your project, eg. workingDirectory/hello/CMakeLists.txt or workingDirectory/simple-motor-control/CMakeLists.txt. - This will automatically open the project configuration panel.
- Choose the build directory of the previously built application as your build directory, e.g. workingDirectory/build-x86/hello or workingDirectory/build-x86/simple-motor-control
- Leave the entries for install directory, build type, and extra arguments empty. These settings will be fetched from the existing CMake configuration in your build directory.
- Click
Ok - Build

No Existing Build Configuration
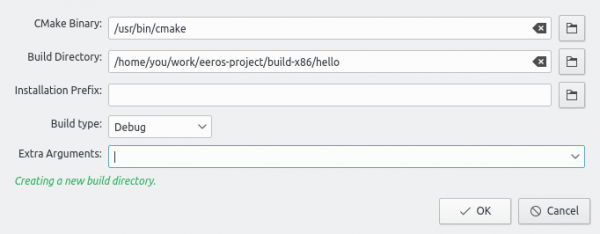
If there is no existing build configuration yet, do as follows
- Import the project by choosing the
CMakeLists.txtof your project, eg. workingDirectory/hello/CMakeLists.txt or workingDirectory/simple-motor-control/CMakeLists.txt. - This will automatically open the project configuration panel.
- Choose a meaningful build directory, e.g. workingDirectory/build-x86/hello or workingDirectory/build-x86/simple-motor-control.
- Enter an entry for the install directory, e.g. workingDirectory/install-x86.
- Choose a build type.
- Click
Ok - Build
Use VSCode
Use VSCode together with an existing build configuration or build it directly. Add the following CMakePresets.json to the root of your EEROS directory, to the directory of a hardware wrapper library or to the root directory of your EEROS application.
{
"version": 6,
"configurePresets": [
{
"name": "debug",
"displayName": "Debug",
"generator": "Unix Makefiles",
"binaryDir": "${sourceDir}/build-x86",
"cacheVariables": {
"CMAKE_BUILD_TYPE": "Debug",
"CMAKE_INSTALL_PREFIX": "${sourceDir}/../install-x86",
"CMAKE_EXPORT_COMPILE_COMMANDS": "ON",
"CMAKE_COLOR_DIAGNOSTICS": "OFF",
"LIB_ONLY_BUILD": "OFF",
"USE_TESTS": "ON",
"USE_ROS2": "ON"
}
}
],
"buildPresets": [
{ "name": "debug", "configurePreset": "debug" }
]
}
Adjust the settings for the build directory and the install directory according to your needs.