getting_started:tutorials:helloworld
This is an old revision of the document!
Getting started with the EEROS robotics framework
Preparation
- Setup an development environment as desribed here
- Start KDevelop
- Create a new C++ project:
- Project → New from Template…
- Choose Standard/Terminal as project type and type a project name (e.g. test-project).
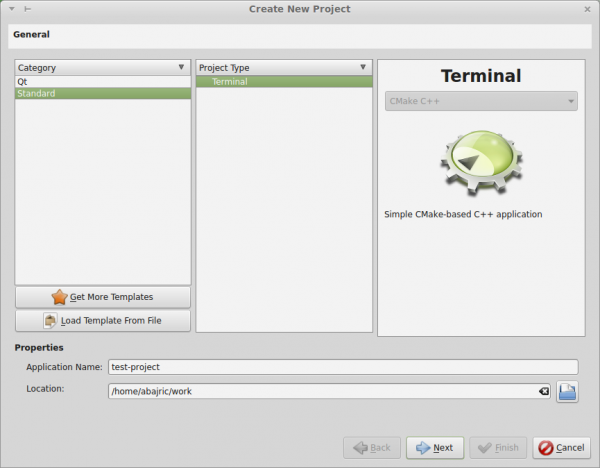
- Create the project by clicking Finish
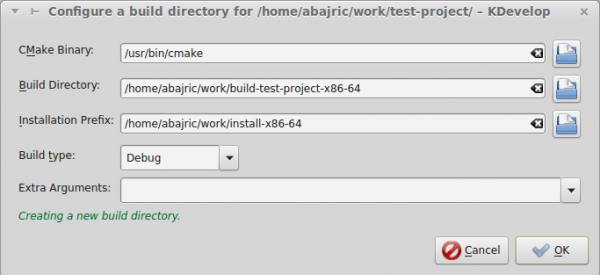
- Create the build configuration. It is recommended to put the target architecture in the name of the build folder. Put the location where EEROS is installed in the “Installation Prefix” field. If EEROS is installed globally leave this field blank (not recommended).
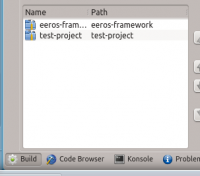
- Check the build sequence on the left bottom of Kdevelop. “eeros-framework” must be before the new project (in this example “test-project”).
- Build the project with the build button.



Say Hello World with EEROS
- Copy the following code into “main.cpp”
#include <iostream> #include <eeros/logger/Logger.hpp> #include <eeros/logger/StreamLogWriter.hpp> int main() { using namespace eeros::logger; StreamLogWriter w(std::cout); Logger<LogWriter>::setDefaultWriter(&w); Logger<LogWriter> log; log.info() << "Hello, EEROS"; return 0; }
- Open CMAkeLists.txt file, delete the text written on it and copy the following:
cmake_minimum_required(VERSION 2.8) project(test-project) include_directories(${ADDITIONAL_INCLUDE_DIRS}) link_directories(${ADDITIONAL_LINK_DIRS}) set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11") add_executable(test-project main.cpp) target_link_libraries(test-project eeros)
(Note 1: “test-project” is the name of the dummy-project created for the example. Put your project name where “test-project” is. Note 2: This file is in the project folder. e.g. /home/user/projects/test-project/)
- Build the project by clicking on the “Build” button up, on the left.
Run the Hello World Program
- Open a terminal
- Navigate to the build folder of your project (e.g. cd /projects/test-project/build/)
- Run the program with the command: ./testproject

getting_started/tutorials/helloworld.1449680388.txt.gz · Last modified: by abajric